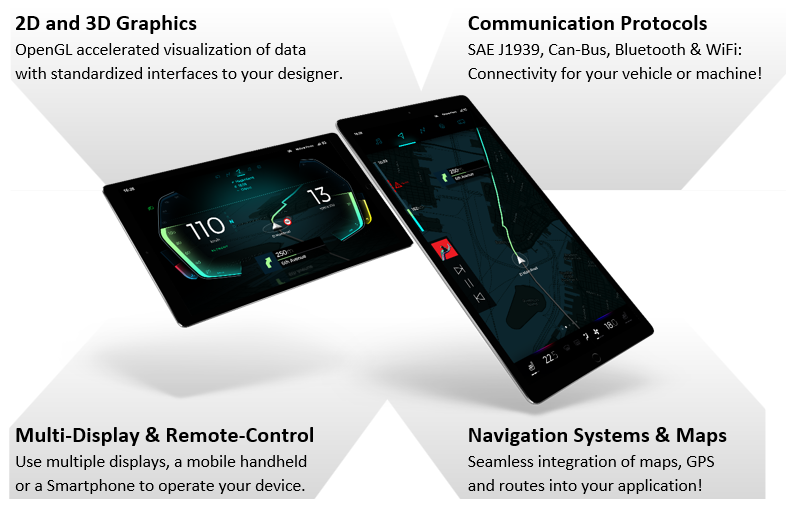
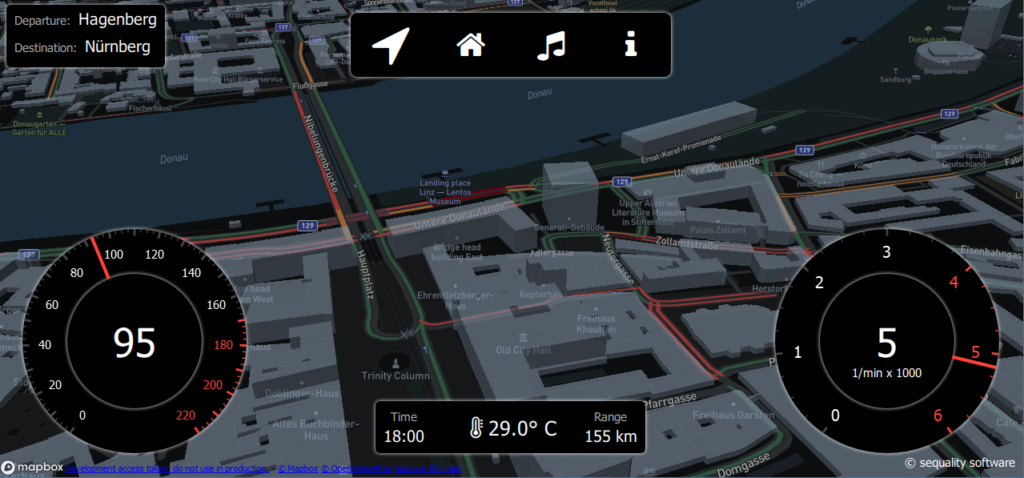
Navigation systems – integrated into your application
OpenStreetMap, Mapbox, HERE maps or an integration of Google maps: You can fully rely on our know-how, when integrating OpenGL and multi-touch map operations into Linux devices. As a result, GPS coordinates and comprehensive data of satellite maps in 2D and 3D are seamlessly integrated into your application.
Download the Sequality Automotive UX Demo description PDF
CAN-bus servers – platform-independent visualization of CAN signals
Evaluate CAN-bus data locally and distribute it event-based via Ethernet throughout the wireless network. This way, CAN data is presented on mobile displays and made available to all users on a flexible basis. Contact us at to test our reference implementation of a Linux-based CAN server for SAE J1939-based CAN-bus data.
IP cameras for digital networks & mirrorless rear-view solutions
Take advantage of hardware-accelerated, digital video streams in real-time for embedded Linux platforms , to develop mirrorless rear-view solutions, 360 degrees all-round views or video conferences. Low-latency moving images via Ethernet or wireless networks are crucial for digital cockpits and facilitate countless application scenarios. Sequality provides software interfaces for the integration of all commonly used industrial cameras. Feel free to test our embedded Linux QtQuick Gstreamer video player or our QtQuick application for off-highway cameras based on ISO17215 by contacting us at .
Examples for Projects
Example: Rosenbauer RT and Panther


Source: rosenbauer.com
Example: Sequality Virtual Cockpit Demo 2017
Technology: C++ Qt QML
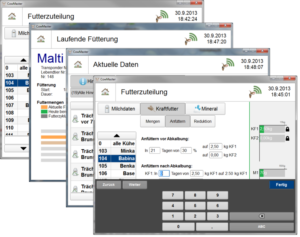
Example: Wasserbauer Butler
Technology: C++ Qt
This software enables big farmers to configure and monitor a feeding robot, which moves autonomously through the stable. In addition to the edition for embedded Linux, a version for Microsoft Windows was developed as well.
Contact us for further information on SEQUALITY software solutions for automotive and off-highway applications!