
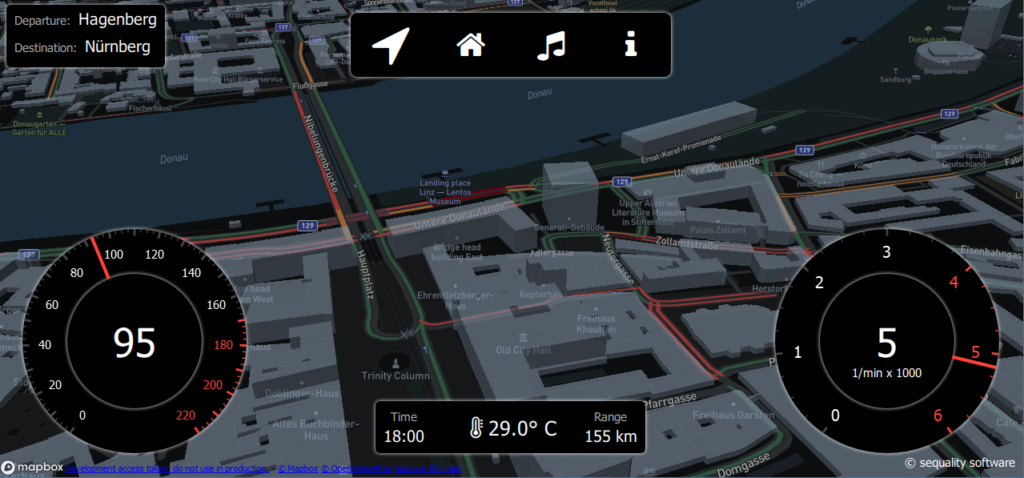
Navigationssysteme – integriert in Ihre Anwendung
Ob OpenStreetMap, Mapbox, HERE maps oder eine Integration von Google Karten: Auf unser Know-How im Bereich Integration von OpenGL und Multitouch-Eingaben am Linux-Gerät können Sie zählen. GPS-Koordinaten und anschauliche 2D- und 3D-Daten von Satellitenkarten werden so zum nahtlosen Teil Ihrer Anwendung.
Download the Sequality Automotive UX Demo description PDF
CAN-Bus-Server – hardwareunabhängig CAN-Signale visualisieren
Werten Sie CAN-Bus-Daten lokal aus und leiten Sie diese Event-basiert via Ethernet im WLAN-Netzwerk weiter. Auf diese Weise werden CAN-Daten auch auf mobilen Displays verfügbar und stehen allen Teilnehmern flexibel zur Verfügung. Testen Sie unsere Referenz-Implementierung eines Linux-basierten CAN-Servers für SAE J1939-basierte CAN-Bus-Daten. Kontaktieren Sie uns dazu unter .
Digitale Netzwerk-IP-Kameras & spiegellose Rückfahrkameras
Nutzen Sie hardwarebeschleunigte, digitale Videostreams in Echtzeit für embedded-Linux-Plattformen, um spiegellose Rückspiegel-Lösungen, 360-Grad-Rundumblicke oder Videokonferenzen zu ermöglichen. Bewegte Bilder mit niedriger Latenz via Ethernet oder WLAN überzeugen in digitalen Cockpits und ermöglichen zahlreiche Anwendungsszenarien. Die Softwareschnittstellen für die Integration gängiger Industriekameras haben wir bei Sequality bereits implementiert. Gerne können Sie unseren embedded Linux QtQuick-Gstreamer-Video-Player oder unsere QtQuick-Anwendung für ISO17215-basierte Off-Highway-Kameras testen. Wir freuen uns auf Ihre Kontaktaufnahme unter !
Projektbeispiele
Beispiel Rosenbauer RT and Panther


Quelle: rosenbauer.com
Beispiel Sequality Virtual Cockpit Demo 2017
Technologie: C++ Qt QML
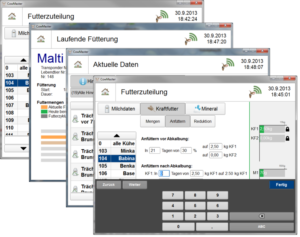
Beispiel Wasserbauer Butler
Technologie: C++ Qt
Diese Software ermöglicht Großbauern die Konfiguration und Steuerung eines autonom fahrenden Fütterungsroboters im Stall. Zusätzlich zur Version für embedded Linux wurde eine Fernsteuerung für Smartphones mit HTML5 entwickelt.
Kontaktieren Sie uns für weitere Informationen zu den Lösungen von SEQUALITY für Automotive und Off-Highway!